Podwozie ciężarówki
Samochody ciężarowe powstawały w moim warsztacie równolegle z maszynami rolniczymi. Pierwszą ciężarówką była drabina strażacka. Tym razem to ja zdecydowałem, a nie wnuk, ponieważ o takiej drabinie marzyłem, gdy byłem małym chłopcem.
Pierwsza drabina powstała w tym samym czasie, co pierwszy traktorek. Koła wszystkich pojazdów frezowałem wtedy na frezarce 3D i nie myślałem, by podwozie było osobnym, uniwersalnym modułem (Zdjęcie 1).
Trochę później zacząłem myśleć o tym, by dodać do podwozia napęd i zrobić z niego osobny moduł. Konstrukcja podwozia została tak przygotowana, by napęd nie był wymagany od samego początku i był tylko opcją (Zdjęcie 2).
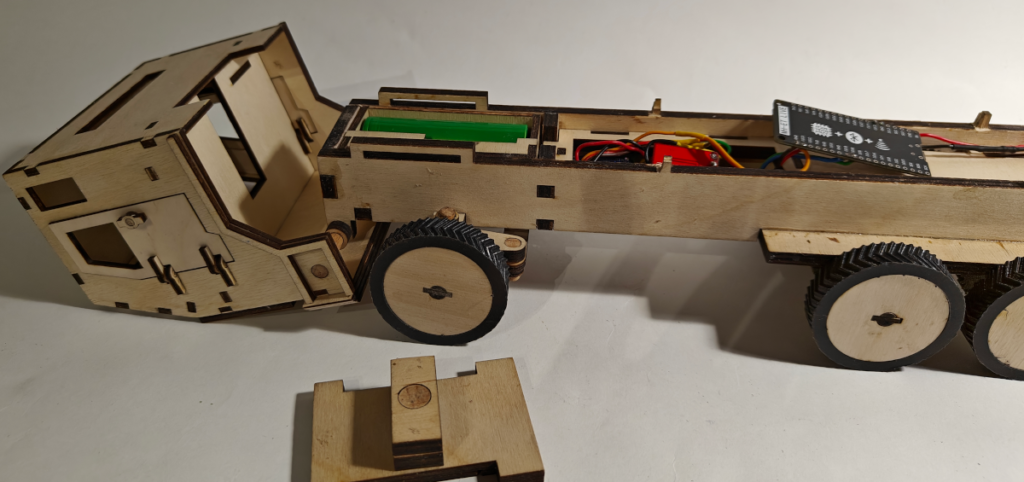
Komora ramy podwozia jest podzielona na dwie części. W przedniej znajduje się moduł zasilania z akumulatorkiem i układem ładowania. W tylnej części znajduje się miejsce na moduł napędowy.
Kabina jest odchylana i dzięki temu można włożyć moduł zasilający. Pokrywa zasilania jest tak przygotowana, by blokada była widoczna w kabinie i „udawała” pokrywę silnika.
Do zasilania używam akumulatorka 18650 o napięciu 3.7 V. Akumulatorek może być ładowany pozostawiony w podwoziu lub w dedykowanej ładowarce po wyjęciu z podwozia.
Ponieważ w module napędu potrzebne są dwa napięcia 5 V i 12 V, moduł zasilania ma dwa wyjścia właśnie na takie napięcia. Zasilanie przekazywane jest za pomocą 3 styków umieszczonych w ścianie rozdzielające komory.
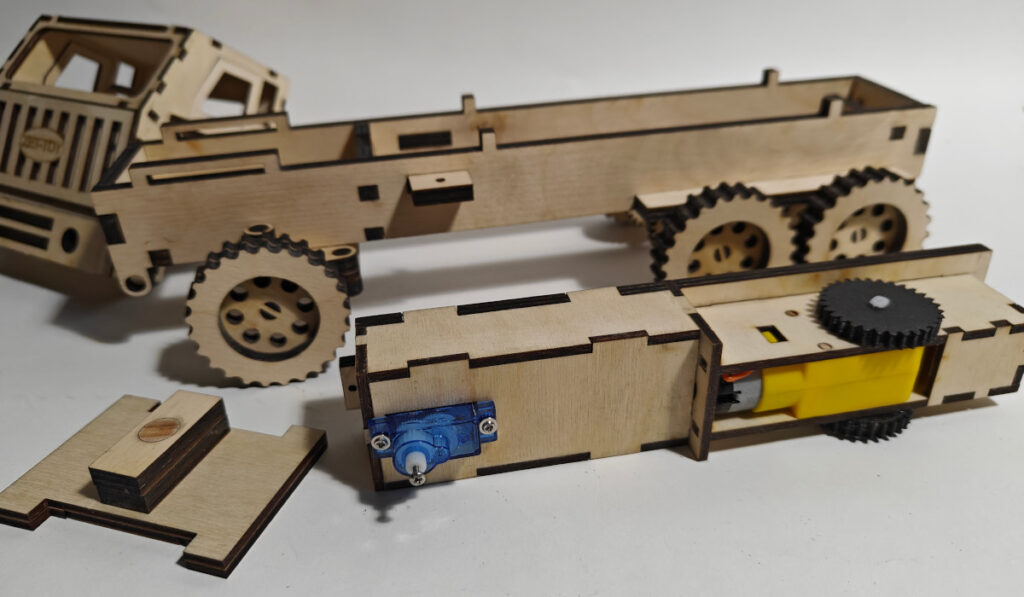
Na zdjęciu 3 widać wyciągnięty z ramy nośnej moduł napędowy. W dolnej części zdjęcia widać serwomechanizm SG-90 do sterowania skrętem kół przednich i silnik z kołami zębatymi, które przekazują napęd na koła tylne podwozia. Koła zębate odbierające napęd znajdują się na osiach kół tylnych.
Za sterowanie serwomechanizmem i kierunkiem i szybkością silnika odpowiada mikrokontroler ESP32, którym można sterować za pomocą joysticka (Zdjęcie 4).
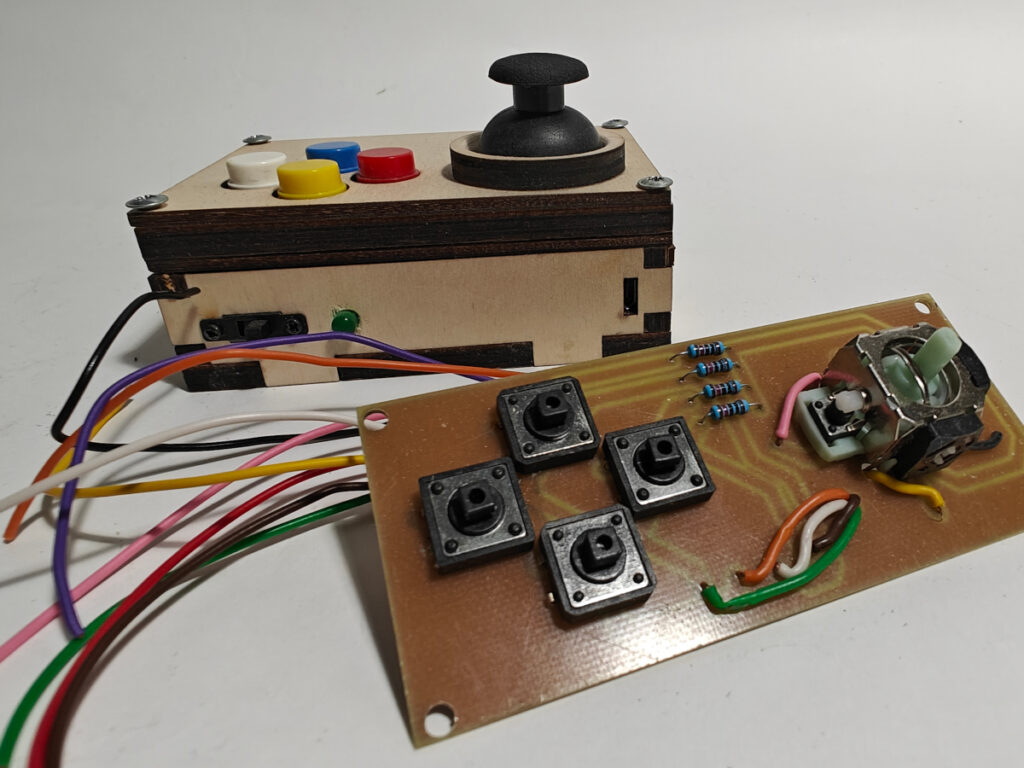
Joystick umożliwia w standardzie sterowanie kierunkiem i prędkością jazdy. Za komunikację odpowiada również mikrokontroler ESP32. Do komunikacji wykorzystuję BLE (Bluetooth Low Energy), zapewniającą niskie zużycie energii.
Joystick wykonany jest na płytce PCB, na której ścieżki wykonuję na frezarce 3D własnej konstrukcji (projekt Root3 – filmik z frezowania). Joystick zawiera drążek zmiany kierunku i 4 przyciski funkcyjne, które można oprogramować w dowolny sposób. Krótki film z testów jednego z pierwszych wersji podwozia można zobaczyć tutaj.
Po wielu próbach i zabawach zdecydowałem, że tę linię na razie odłożę i skoncentruję się na zrobieniu wersji bez napędu. Wnuk jest na tyle mały, że sterowanie zdalne jeszcze go nie interesuję. Do pomysłu wrócę za jakiś czas.
Po odłączeniu sterowania zdalnego pozostał do rozwiązania problem, jak w takim razie sterować kołami przednimi. Można je zablokować, tak jak w wielu prostych zabawkach, ale ja zdecydowałem, że zrobię przeniesienie napędu z kierownicy (w poprzedniej wersji kierownica ruszała się, ale nie sterowała kołami).
W takim podejściu jest kilka problemów do rozwiązania: przeniesienie skrętu z kierownicy umieszczonej w kabinie pod pewnym kątem oraz przesunięcie osi kierownicy w stosunku do środka obrotu osi kół. Znowu rozwiązanie przyniosły koła zębate i wodzik podobny jak w traktorku.
Liczbę zębów (a przez to średnicę podziałową) dobrałem tak, by małe koło umieszczone na osi kierownicy napędzało duże koło sterujące wodzikiem wymuszającym skręt. Ponieważ pracowałem z ramą, która miała już ustalone wymiary, wpasowanie kół było dosyć skomplikowane. Ostatecznie zrobiłem dodatkowe nacięcie w ramie nośnej, by zrobić miejsce na obracające się koło. Montaż kół i wodzika wymaga sporo precyzji, ale mechanizm działa i koła skręcają w wyniku skrętu kierownicy.
Na zdjęciu 5 widać otwarte drzwi kabiny i fragment kół zębatych umieszczonych pod płytą główną kabiny. Decydując się na koła zębate, musiałem podnieść trochę płytę główną i wyeliminować miejsce „na nogi” kierowcy.

Zmiana konstrukcji dotyczyła również wielkości kabiny, ponieważ „pamperek”, którym bawi się wnuk, był trochę za duży. Powiększyłem więc wysokość kabiny i dodałem kilka kosmetycznych zmian, między innymi zaokrąglenie dachu i zaokrąglenie większości narożników. Powiększyłem również zawiasy w drzwiach i dodałem zaginane zderzaki.
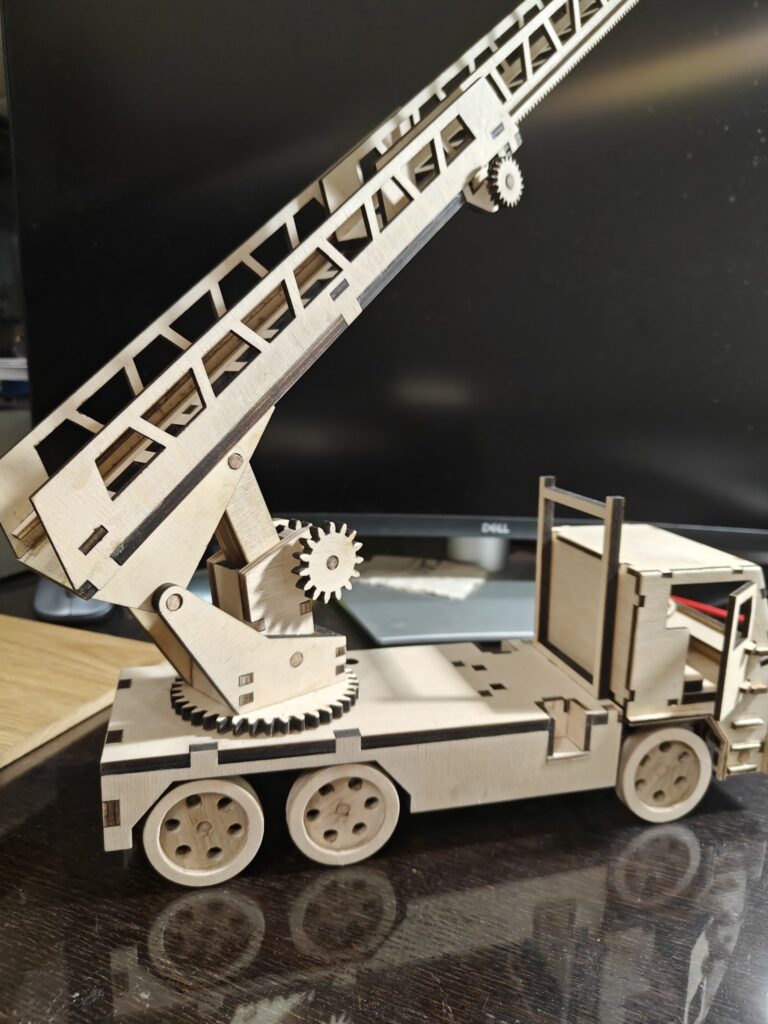
Wielkość ramy nie została zmieniona, więc poprzednio zbudowane nadwozia daje się montować na nowej wersji. Dla ułatwienia dodałem jedynie gniazda na nakrętki M3 eliminujące potrzebę używania dodatkowych narzędzi przy łączeniu podwozia z nadwoziami, Na zdjęciu 6 widać nowe podwozie zmontowane ze starszą wersją drabiny strażackiej.

O drabinie i innych nadwoziach opowiem w kolejnych wpisach.
Na razie pozdrawiam i czekam na maile, Dziadek Zbyszek.